
问题:
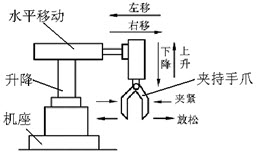
已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。
物料搬动机械手结构原理图
已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。
物料搬动机械手结构原理图
● 参考解析
本题暂无解析
相关内容
相关标签
