RNC设备与核心网相连的接口板为() ["SLIA","CSIA","IMAA","ACSA"]
已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。 物料搬动机械手结构原理图
煤气过剩放散量()时应点火炬。 ["大","特别大","小","比较小"]
煤气室内作业应保持通风良好,CO含量不超过()PPm。 ["20 ","22 ","24 ","26"]
已知五自由度机器人,采用直流电机控制,关节转角的测量采用增量式编码器,具有手动示教和再现功能,试确定其控制计算机及控制方案。 提示:画出控制方案原理图,并作简要说明。
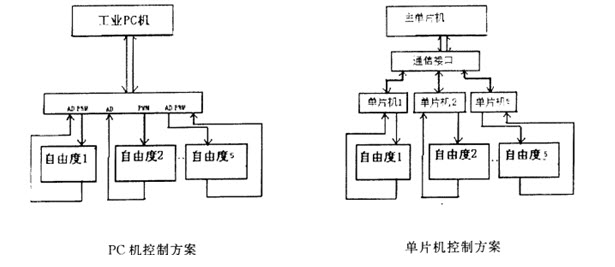
已知五自由度教学机器人,采用直流电机控制,关节转角反馈采用电位计,具有手动示教、再现功能,可以使用PC机集中控制或者分级式单片机控制,试分析比较两种控制方案的优缺点。