化学分析滤纸常用定性和定量两种。静态离子交换法测定水泥SO3应该有(),测定水泥比面积所用的滤纸为()。
通井机在使用过程中,主离合器的间隙()。 ["A、变化不定","B、不会变大","C、不断变小","D、不断加大"]
加工原理误差是指由于采用了近似的()或近似的()进行加工所产生的误差。
做石膏SO3时,需称取()石膏样品,放入()树脂,加入()热水,在磁力搅拌器上搅拌()。
随机排列的特点在于它的() ["A、客观性","B、公平性","C、随机性","D、准确性"]
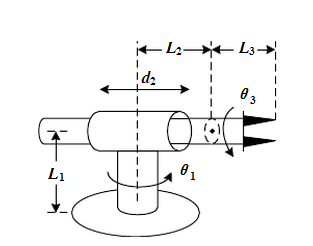
如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称RPR机械手),求末端机械手的运动学方程。